
$wordFlash E | |
|---|---|
 | |
| 開発元 | 武田エレクトロ |
| 種別 | マイコンボード |
| シリーズ | $wordFlashシリーズ |
| 発売日 | 2022/09/01 |
| CPU | Blue-Bear X3 |
| メモリ | 512KB SRAM |
| 電源 | 5V DC |
| 前世代 | $wordFlash D |
概要 
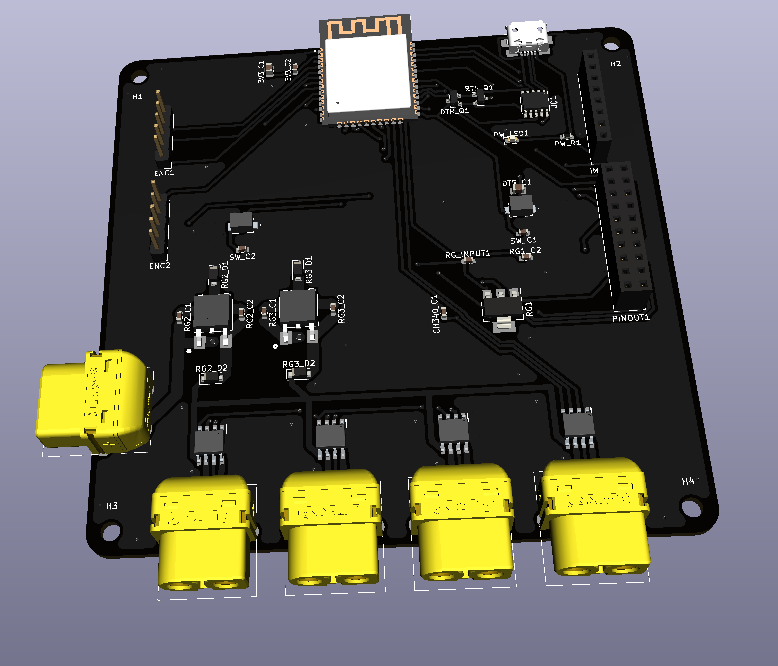
$wordFlash EとはWiFiとBluetooth通信機能、0-30Vモーター駆動機能、6軸ジャイロセンサ、ロータリーエンコーダカウンタ機能を搭載したIoT機器、小型ロボット開発向けマイコンボードである。CPUには自社で開発したBlue-Bear X3搭載し、モータドライバは高出力用モータドライバTE6020を搭載している。
開発
開発の経緯として、前モデルから引き継ぐ「汎用的なロボット開発基板を提供する」に基づき設計され、基本機能であるモータ駆動機能、通信機能に加え6軸ジャイロセンサ、ロータリーエンコーダカウンタなどが追加されたことにより「自動制御ロボットの開発が難しい」という課題も解決した。
$wordFlash Eの前世代Dでは、レギュレータの発熱、モータドライバの発熱、高負荷処理時の通信不安定などの問題があった。レギュレータの発熱を解決するため自社開発の低損失、大電流レギュレータTE9003C,TE9012とヒートシンクを用いて発熱の問題を解決、モータドライバの発熱の問題はTE6020の改良版TEA6020を用い高周波対応可能にし、内部FETの発熱を抑えることで問題を解決、高負荷処理時の通信不安定はCPUをBlue-Bear X3にすることで解決した。
$wordFlash Eの前世代Dでは、レギュレータの発熱、モータドライバの発熱、高負荷処理時の通信不安定などの問題があった。レギュレータの発熱を解決するため自社開発の低損失、大電流レギュレータTE9003C,TE9012とヒートシンクを用いて発熱の問題を解決、モータドライバの発熱の問題はTE6020の改良版TEA6020を用い高周波対応可能にし、内部FETの発熱を抑えることで問題を解決、高負荷処理時の通信不安定はCPUをBlue-Bear X3にすることで解決した。
特徴
- CPU:マイクロコントローラ:2core,32bit,クロック周波数300MHzで動作
- RAM:512KB SRAM
- 無線:
- WiFi
- Bluetooth v5.0
- インターフェース:
- 18*12bit ADC
- 2*8bitDAC
- 20*PWM
- 2*I2C
- 4*SPI
- 3*UART
- CAN Bus
- TX/RX
- 低電力モード
- 電力管理:
- 5V/3.3V変換レギュレータ
- ディープスリープ
- 12V変換レギュレータ
ソフトウェア
$wordFlashを動かすプログラムとして「」と共同開発を行ったShiDen IDEとSeiDen IDEが挙げられる。
ShiDen IDE
世界シェアが高まっているプログラミング言語Emblessでの開発とC++での開発、WorldPortでのソースコード共有、高速書き込みをサポートしている。また、特筆すべき点としてLiteモードという入門者向けのモードがある。このモードを使用すると表示されるものが最低限の機能(コンパイル、書き込み、自動インデント)のみに制限され、ソフトウェア開発に不慣れな場合でも容易にプログラミングできる。
WorldPortでの共有機能
WorldPortというソースコードなどの変更履歴を追跡・記録するためのバージョン管理システムとの連携が可能であるため、大人数での大規模な開発も可能である
Emblessでのプログラミング
組み込みシステムの入門者の多くが試す最初のプログラムが同梱されている。$wordFlashシリーズは13番ピンがLEDに繋がっているため追加部品が無くてもテストが可能である。
\ EmblessでのLED点滅プログラム $DF LED_PIN 12 setup=> SET_P:LED_PIN, OUTPUT; loop=> OUT_PH:LED_PIN; WAIT:1s; OUT_PL:LED_PIN; WAIT:1s;
\ モータテストプログラム setup=> SET_MT:1; loop=> MT:1, 255; WAIT:1s; MT:1, -255; WAIT:1s; MT:1, 128; WAIT:1s; MT:1, 0; WAIT:1s;
\ 6軸ジャイロセンサプログラム setup=> SET_GYRO; SET_SERIAL:9600; loop=> SERIAL.PRINT: GET_GYRO: X, Y, Z, ROLL, PITCH, YAW; WAIT:500ms;
SeiDen IDE
ShiDen IDEの機能を最低限に圧縮し、ブロックプログラミング言語Emblueを用いた開発が可能な小中学生向けの開発環境である。

タグ
コメントをかく